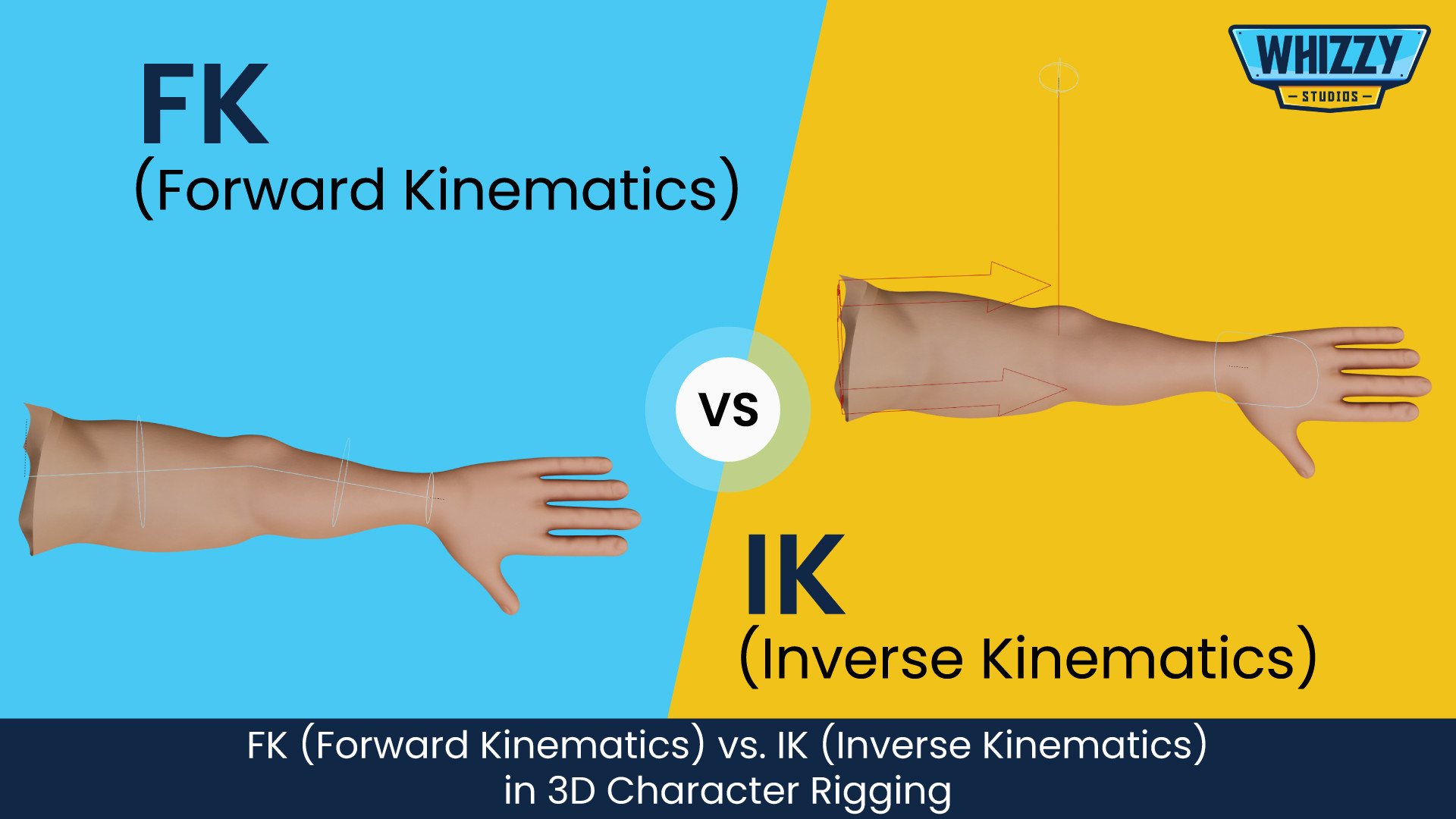
Viết tắt của Inverse Kinematics và Forward Kinematics, là hai phương pháp cơ bản để điều khiển chuyển động của các chuỗi xương trong hoạt hình 3D.